

有一天,我看着蚂蚁般的机器人爬进了我的手机……
能够跳跃和爬行的微型机器人很快就会被加入到工业物联网中。这些设备是一种带有腿状附件的印刷电路板,工作时不需要带宽很宽的网络,彼此之间以自组织的方式工作,高效地进行通信。
最近发布的一些突破性发明使这些类似蚂蚁的助手成为可能。
振动驱动的微型机器人
第一个发明是利用超声波和其他来源(例如压电致动器)的振动,使微型机器人能够响应命令。压电效应是指某些材料在机械压力作用下产生电荷。
佐治亚理工学院的研究人员已经制造出了振动驱动的3D打印微型机器人。只有0.07英寸长,像蚂蚁一样的装置——他们称之为“微型鬃毛机器人”,有四到六条细长的腿,能够按照腿的设计对不同的颤动频率作出反应,分别移动。
研究人员说,微型机器人可以用来感知环境变化,还能移动材料。

佐治亚理工学院助理教授Azadeh Ansari在一篇文章中写道:“当微型鬃毛机器人上下移动时,可通过优化腿的设计,将垂直运动转化为定向运动。”通过频率和振幅来完成转向。研究人员介绍说,甚至还能跳跃和游泳。
能越过任何表面的自组织微型机器人
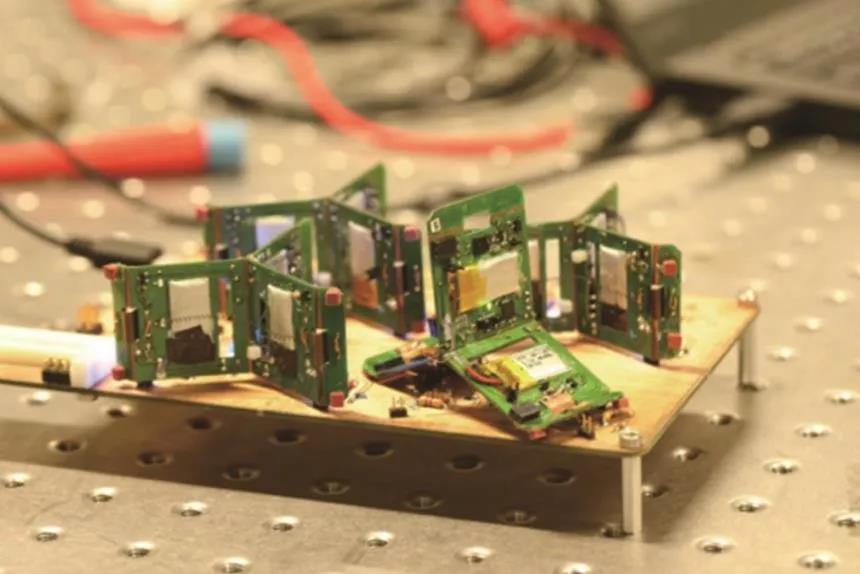
在另一项发明中,瑞士洛桑联邦理工学院(EPFL)的科学家们介绍说,他们已经克服了运动的局限性,现在可以让微型自组织机器人越过任何表面。在工厂里推物体就是一种应用。
机器人已经能跳起来了,而现在它们还能自我组织。这所瑞士大学的有腿PCB机器人群能够自己计算出需要多少其他微型机器人伙伴才能完成某一项工作。此外,机器人群的临时性、群体性和自组织特性意味着它不会发生灾难性的失败——当需要时,替代机器人会被组织起来,加入到工作环境中。
自组网是这类机器人的发展方向。物联网自组网的一个优点是可以随机的分布传感器,而作为基本节点的传感器知道怎样进行通信。路由器不参与其中。这些节点进行采样来确定附近还有哪些其他节点,包括需要多少带宽等。
这一概念的原理与市场营销人员仅仅通过询问一个有代表性的群体(而不是每个人)的想法,来对公众意见进行采样的原理相同。蚂蚁也是这样来衡量蚁巢的大小,它们只计算碰到的蚂蚁,从不计算所有的邻居。
这种鲁棒的网络非常适合传感器被无意中移动了位置的情形。几年前,当我撰写关于这一理论的文章时,我举了随机散布在活火山中的环境传感器的例子。
瑞士机器人(与大阪大学联合开发)使用了相同的概念。它们也可以放在需要环境观察的地方,工厂热点就是一个例子。集体智能还意味着不再使用GPS或者视觉反馈功能,这与目前的无人机技术不同。
更小的工业机器人
宾夕法尼亚大学教授Marc Miskin今年3月在美国物理学会发表演讲时说,他正在研究更小的机器人。
Kenneth Chang在《纽约时报》的一篇文章中写道:“它们能爬进手机电池,清洁电池,让电池恢复活性。培养皿中的数百万个微型机器人可以用来测试网络和通信方面的概念。”
作者:Patrick Nelson是音乐产业交易出版物《生产者报告》的编辑和出版人,曾为许多科技博客撰稿。Nelson写了一部经典小说《蔓延论》。
编译:Charles
原文网址:https://www.networkworld.com/article/3429200/self-organizing-micro-robots-may-soon-swarm-the-industrial-iot.html
责任编辑:周星如




